Franka Emika 机器人结合了最高级机电一体化。它配备了 100 多种不
可调节式引导模式可以补偿重力和摩擦力,将感知重量降低 60 倍,确保人与机器之间进行流畅而优雅的交互。人机界面正好位于机器人手臂上,方便通过用户界面进行远程控制。此外,我们还采用了精密传感器、控制算法和内部模型,使···
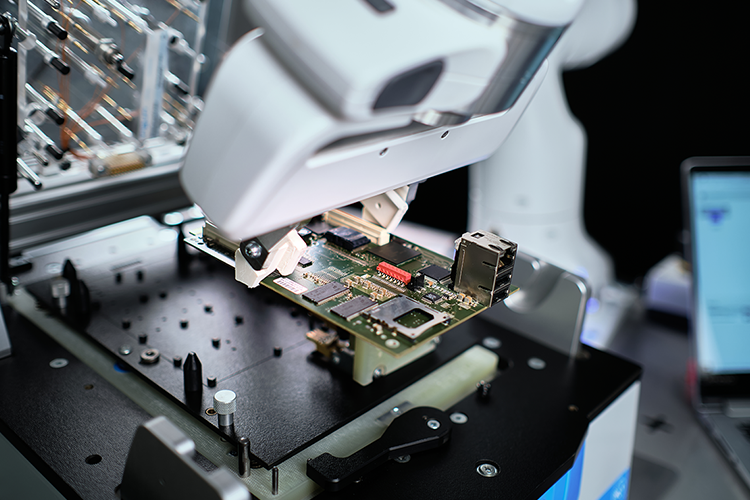
在其工作区域内,它的操作范围可远达 855 毫米,也可以非常接近自己的基座,而其 7 轴几何形状允许以复杂的姿态到达难以到达的空间,即使在狭窄的环境中也能顺利执行流程。
优雅的结合了工业级革命性感应和工业级位置控制。除了具备力度感应能力外,该机器人还具备经典刚性工业机器人的特点,其姿态重复误差不超过+/-0.1毫米(ISO 9283),即使在高速运作下也几乎没有路径偏差。这使得制造过程实现了···
由于在所有 7个轴上应用了自主设计的业界领先的扭矩传感器,因此具有超强灵敏度,可精确感应接触力度。具备出色的分辨率、精确度和可重复性,能够动态感知环境,超越大多数专用力度传感器的性能。该机器人只需施加轻微的力度即···